Zapomeňte na kola! Planetární průzkumníci budou mít pavoučí klouby!

Super Ball Bot - Obrázek 4

Vypadá to, že nastává nová éra průzkumných výprav do vesmíru. Několik zemí plánuje lety na Měsíc či Mars a mají přijít nepilotované mise na další planety a vesmírná tělesa. Proto státní i soukromé společnosti vyvíjejí nové vesmírné technologie.

Jednou z předních organizací zabývajících se průzkumem vesmíru je samozřejmě americký Národní úřad pro letectví a vesmír (NASA). A právě specialisté z NASA mají na svědomí jeden z nejbizarnějších projektů, jehož výsledek se má v budoucnu vydat do vesmírných dálav a na povrchy vzdálených kosmických těles.
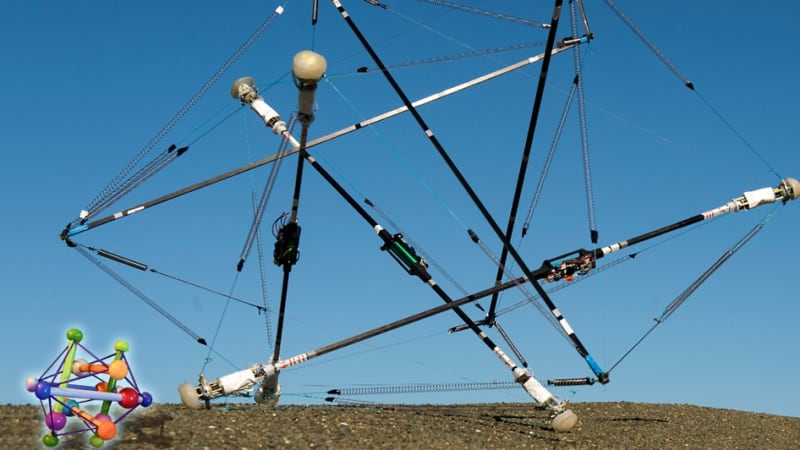
Jmenuje se Super Ball Bot a představuje robota s tzv. tensegritskou strukturou, tedy zjednodušeně řečeno je to robot složený ze změti drátů a tyčí, který se má prohánět po povrchu interstelárních těles. Když se řekne robot pro průzkum cizích planet, většina lidí si představí nemotorné vozítko s kolovým podvozkem a množstvím antén, stožárů a pohyblivých ramen. Jenže robot Super Ball se těmto představám naprosto vymyká, nemá žádný trup či karosérii a už vůbec ne podvozek a kola…
Super Ball Bot vzniká v rámci programu Innovative Advanced Concepts (NIAC) v Ames Research Center patřící pod NASA jako „zařízení pro přistávání na povrchu cizích planet a jejich průzkum“. Jeho naprosto všem představám se vymykající konstrukce zcela odpovídá označení tensegritská. Pojem tensegrity zavedl už v 60. letech americký architekt, konstruktér a vynálezce Richard Buckminster Fuller. Vznikl spojením slov tensional integrity a popisuje princip, ve kterém jsou tvar a struktura objektu dány uzavřenou sítí napětí (sítí drátů) a tlaků (např. pevnými tyčemi). Soustava drátů a pevných tyčí může při spojení vytvořit viditelně diferencované vzájemné tahově-tlakové působení, které funguje jako pevná ale zároveň pružná konstrukce schopná pohybu a zároveň odolávající i reagující na vnější impulsy (podobně jako například pneumatika automobilu).
Hlavní výhodou tensegritské konstrukce je velmi účinné rozprostření vnějších sil, které na ni působí v kterémkoliv jejím místě. Jakýkoliv vnější silový impuls se rozprostře do naprosto celé konstrukce, takže se jeho intenzita maximálním způsobem utlumí. Tensegritský robot, jakým je Super Ball, má navíc obrovskou přednost v tom, že jeho jednotlivé součásti nejsou trvale spojeny, takže se dá snadno rozložit i složit. Obě tyto vlastnosti přinášejí nepředstavitelné možnosti pro vesmírné průzkumné mise. Díky tensegritské konstrukci lze postavit velmi lehké roboty, které ve vesmírných lodích ve složeném stavu zaberou minimální prostor, přitom ale nabídnout dostatečnou odolnost pro přistání na cizích planetách i pohyb po jejich členitém povrchu.
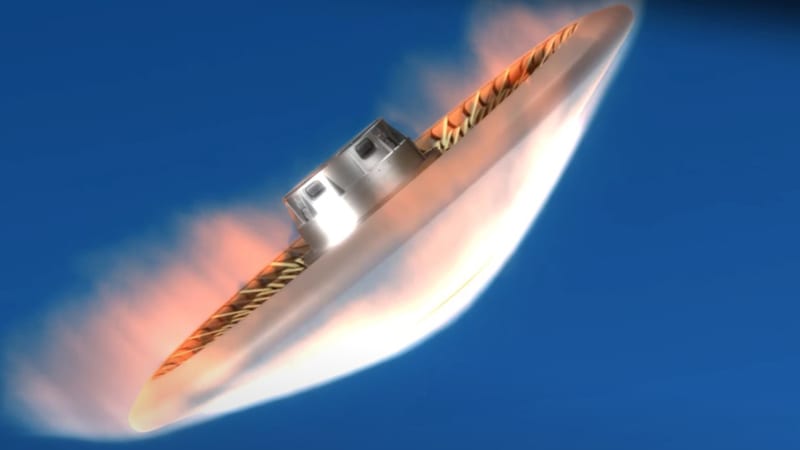
Robot jako Super Ball totiž může být svržen přímo z lodě obíhající na orbitu a nepotřebuje drahé přistávací platformy s raketovými motory nebo padákové systémy. Tensegritská konstrukce dává robotovi dostatečnou pevnost, aby na vesmírná tělesa s nízkou gravitací, například Saturnův největší měsíc Titan, dopadl elegantně a bez poškození jako kopací míč na trávník fotbalového hřiště. Jenže pevná, ale zároveň pružná tensegritská struktura robotu dovoluje i samostatně se pohybovat stejným způsobem jako u onoho fotbalového míče. Ano, tato změť drátů a tyčí se dokáže koulet a dostat se tak tam, kde ji vědci chtějí mít, aby mohla pomocí přístrojů provádět výzkumnou činnost.
Jak to bude fungovat?
Konstrukce robota Suber Ball má dálkově nastavitelnou tuhost, proto je schopná absorbovat nárazy při přistání, ale zároveň vytvořit dostatečně pevnou platformu pro přesné měřicí přístroje. Celý tento „zázrak“ mají na svědomí miniaturní elektromotory ukryté v pevných tyčích konstrukce Suber Ballu, tyto motory podle potřeby navíjejí, utahují, nebo naopak povolují spojovací dráty. Počítačově řízená souhra těchto elektrických „svalů“ robotovi umožňuje odolávat vnějším silovým impulsům a zároveň mu dává schopnost samostatně se pohybovat, tedy koulet, libovolným směrem podle pokynů z řídícího střediska. A žádné kopce nebo terénní překážky jej nezastaví. Suber Ball Bot se dokáže pohybovat dokonce i v případě, že je nefunkčních 75 procent jeho elektromotorů, nebo když jsou některé spojovací dráty konstrukce přetržené.
Na fotografiích a videích můžete vidět několik z celkem 18 vývojových návrhů Suber Ball Botu, které vznikly od roku 2012, kdy projekt robotů s tensegritskou strukturou začal. Zatím poslední podoba Super Ball Botu má 12 motorů, výsledný velký prototyp jich dostane hned 24. Navíc ponese i vědecké přístroje a poslouží k definitivním testům funkčnosti celé soustavy. Vývojový tým zatím pracuje na zdokonalení řídícího systému robota, není totiž jednoduché usměrnit pohyb změti drátů a tyčí s množstvím elektromotorků. K tomu je zapotřebí velmi složitých výpočetních algoritmů, jež se musejí zakomponovat do ovládacího softwaru.
Jde totiž o pohyb nelineární soustavy, navíc celý pohonný systém má být inteligentní, tedy se bude umět automaticky přizpůsobovat okolním podmínkám. Další výzvou je najít hranici maximální rychlosti, kterou se budou moci tensegričtí roboti pohybovat. I to bude záležitost řídícího softwaru, aby dokázal rychle, ale zároveň přesně sladit činnost všech pohonných elektromotorů, podobně jako to dokáže třeba mozek s lidskými svaly. Vypadá to, že se kola pomalu ale jistě odebírají do propadliště dějin, ostatně příroda je také nepoužívá…

Nenechte si ujít novinky Prima Zoom!
Odesláním formuláře souhlasíte s podmínkami zpracování osobních údajů